
THE idea to develop an affordable driver assistant system to achieve Automatic Train Operation (ATO) at Grade of Automation Level 2 (GoA2) arose about three years ago, and despite a one-year delay, achieved proof of concept in December 2019.
The Auto-Ferrivia team comprises four specialists. Mr Hans-Peter Vetsch is a career railwayman having worked for Swiss Federal Railways (SBB) for 21 years. In 1991, Vetsch was appointed head of safety and operation with AlpTransit Gotthard for the Gotthard Base Tunnel project. In 2014, Vetsch joined DB Network where he was involved in bringing ETCS into operation on the Berlin - Nuremberg high-speed line. The following year, he set up Vetsch Rail Consulting.
The other team members are Mr André Schweizer, a signalling specialist, who is head of Railtool, Mr Adrian Egloff, a rolling stock specialist and head of Rail Systems Engineering, and Mr Markus Schindelholz, CEO of the Oensingen Balsthal Railway (OeBB) where the ATO tests took place. In addition, four consultants assisted with the Auto-Ferrivia ATO project.
“The idea was to invest nothing, only our knowhow to create a database,” Vetsch told IRJ. “We know where the trains are, the routes and signal aspects - all the information is there - we just need to give it to the trains.”
The Auto-Ferrivia ATO solution allows a simple, non-reactive expansion of an existing, conventional railway with conventional colour light lineside signalling and traditional train control. The proposed ATO concept is largely technologically independent of the vehicle and infrastructure and is particularly suitable for railways with simple operating conditions. It should also be possible to introduce it quickly.
“Railway and industry experts repeatedly postulate that ATO can only be introduced in connection with the most modern technologies on the infrastructure and rolling stock,”
Auto-Ferrivia
“A railway is predestined for automated operation due to the fact that trains are bound to the track, unlike road, water and air transport, and its two-dimensional movement (distance and time) makes it comparatively easy to monitor and control,” Auto-Ferrivia says.
Nevertheless, automated driving has hardly been used on conventional railways to date.
Between 1976 and 1980, a RABDe 8/16 (Chiquita) train with ATO ran on the Baden - Koblenz LZB test track, while in Spain a train fitted with ATO operated in scheduled service with passengers between 1977 and 1979 on the Madrid Atocha - Pinar del las Rozas line. However, development of ATO was discontinued due to cost and the introduction of ETCS.
“Railway and industry experts repeatedly postulate that ATO can only be introduced in connection with the most modern technologies on the infrastructure and rolling stock,” Auto-Ferrivia says. “However, most railways cannot renew infrastructure and rolling stock in one go due to the different life cycles.”
Driver support
Auto-Ferrivia regards ATO as supporting the train driver with the GoA2 ATO acting as a driver assistance system that allows the train driver to hand over routine actions, such as cruise control, acceleration and braking according to speed thresholds and approaching stops. ATO enables operationally optimised driving, but the train driver can take control of the train at any time and disable the ATO.
The train is monitored by the existing train control system, which works in the background and intervenes when the permissible speed is exceeded through automatically-initiated braking. “As existing train control systems are extremely reliable, movements beyond the permitted speed or the geographical end of the movement authority are not possible during the train’s journey,” Auto-Ferrivia says.
“The proposed ATO system under GoA2 (where the driver is responsible) does not have to be set up in a fail-safe design like a signalbox or a modern train control system such as ETCS Level 2, but can be understood as an automation or telematics application. This simplifies approval, increases flexibility and reduces costs.
“We should only use ATO for point-to-point and train-to-train operation. Empty stock movements could be one of the biggest markets for ATO.”
Mr Hans-Peter Vetch, Vetsch Rail Consulting
“Another approach, for example, would be to merge ATO with the train control. This would have a significant impact on complexity and flexibility due to the time and cost of safety validation and certification.
“If ATO is to support the train driver, who must have all the information needed to properly operate the train.”
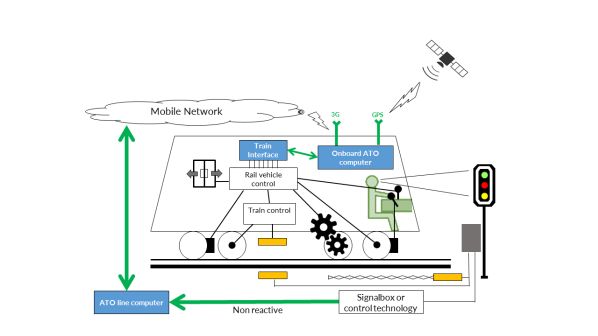
The dynamic information about all train journeys, namely the status of the signals and position of the trains, is recorded and updated in a database via a non-reactive capturing device (sniffer) of the signalbox or control system data.
Likewise, a route atlas is stored in this database with the static route data, such as fixed speeds in stations on the line and speed curves as well as stopping points, in a one-dimensional form as a distance to target signal or reference point.
The conditions and information relevant to the train are periodically queried by the onboard ATO computer via a 3G or 4G internet connection. The ATO computer uses this information to calculate the static speed profile (SSP) and the dynamic speed profile (DSP) using the train’s properties such as length and braking ratio.
Train location is achieved by GPS. A challenge when using GPS is the lack of reception on sections of the route. As the train is tied to the track, the distance travelled after a GPS signal loss can be determined relatively easily using existing wheel rotation sensors.
The ATO onboard computer continuously determines the distance between its position and the reference point and can thus derive the currently permissible speed from the DSP.
The target speed is sent to the vehicle control via a special interface which depends on the vehicle type, but becomes more complex when working with older vehicle technology.
Testing
The 4km OeBB electrified branch line from Oensingen to Balsthal was ideal for the ATO tests as it has simple operating conditions and there are no conflicts with other trains. The passenger service stops at 20.00, allowing plenty of time for test operation. However, the infrastructure is quite old and the functionality of the system is limited in terms of automation.
The safety systems consist of two block sections with corresponding signals and seven level crossings partially integrated into the signalling. The line only has manually-operated switches. Train protection is a standard ZUB/Signum system with Packet 44 ETCS Level 1 Limited Supervision. Only the stations have individual track vacancy sections. The route is set manually by the train driver via radio or local buttons.
The OeBB signalbox is based on Domino relay technology. The trackside ATO computer acting in a similar way to a control system was superimposed on this technology. This processes the retroactively captured states of the signals (stop or proceed) in the route information and assigns them to train numbers using a timetable.
Using this principle, all relay signalboxes could be connected to ATO. In Switzerland, the majority of safety systems are still based on this technology. If available, the data required by ATO can also be taken from an electronic signalbox or a control system, provided that the corresponding interface is known.

The train used for the test runs was provided by the Koblenz Depot and Rail Vehicle Association (DSF) and Rail Systems Engineering. The EMU dates from 1991, which made retrofitting ATO complex compared with a modern train. A special interface had to be developed which converts the ATO commands into digital and analogue signals, which the train can understand.
“Extensive practical experience will show whether and where automated operation has its advantages and disadvantages and, if necessary, its justification.”
Vetsch
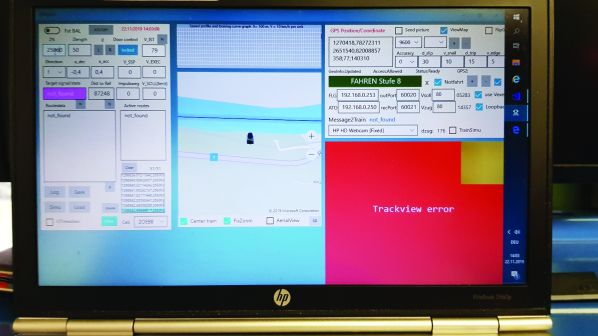
The test runs were carried out using a laptop as the ATO onboard computer. The ATO test software containing all the necessary functionalities was installed on the laptop to which a GPS sensor and a webcam for visualisation were also connected.
The first test runs between Oensingen and Balsthal took place on December 17 2019. “The transmission of the data from the signalbox to the train worked perfectly,” Auto-Ferrivia says. “Likewise, the GPS location proved to be very stable and reliable. The specifications for the vehicle control provided by the ATO computer were correctly implemented by the interface and resulted overall in a satisfactory but still optimisable test run. The targeted stopping process in particular was demanding and parameters had to be set using numerous settings.
After a few fine adjustments, autonomous trips were completed in both directions without the driver’s intervention (with the exception of the route request demands by radio). The system even took over control of the doors. At each stop, the doors were released for an adjustable time. After feedback from the door lock, the train continued automatically when the signal was set.
Results
“We did 10 test runs and saw that the system worked well,” Vetsch says. “The train ran at GoA4 - the driver was only onboard to meet test running safety requirements.
“The test run showed that automated driving on conventional railways is possible with relatively simple means. ATO doesn’t need to be interoperable as it costs too much, and we shouldn’t try to match ATO with ETCS.
“We should only use ATO for point-to-point and train-to-train operation. Empty stock movements could be one of the biggest markets for ATO.”
Auto-Ferrivia believes that as its ATO system can be superimposed on existing infrastructure and train systems, investment should be minimal and migration rapid, even with interlockings and trains that are relatively old.
“We have proved the concept, and the project has come to an end,” Vetsch says. “Extensive practical experience will show whether and where automated operation has its advantages and disadvantages and, if necessary, its justification.”

