
AVOIDING rail surface defects such as corrugation, squats and defects at welded joints is critical in maintaining track safety and reliability. These issues are major contributors to railway rolling noise and demand specific maintenance actions, such as track inspection and rail grinding with dedicated railway vehicles and machines.
To reduce maintenance costs, various industry groups and research institutes from around the world are investigating condition-based and predictive maintenance strategies. Among the key developments is the use of in-service trains for quasi-continuous monitoring of track conditions. These vehicles are equipped with dedicated telematic devices and require the use of specific data analysis algorithms to transform sensor data into health status information.
To date, the focus of this work has been on high-capacity mainline networks, where efforts to implement predictive maintenance strategies are intensifying. Small to midsize railways such as those at ports typically employ visual inspections at periodic time intervals sometimes with the aid of hand-held devices or trolleys. This is very labour intensive and requires track closures, causing disruption to operations. The result is often significant intervals between two inspections with the subjective nature of manual evaluations hindering the monitoring of deterioration trends and limiting the early detection of track defects.
The acceleration of digitisation, specifically the development of low-cost sensors that can be fitted to in-service rail vehicles to monitor track conditions, is opening enhanced approaches to track maintenance for small industrial rail networks.
At the German Aerospace Center (DLR), modular multi-sensor systems have been developed for on-board positioning and the acquisition of geo-referenced track monitoring data for different operational environments. Such a system has been installed on a shunter used at the Braunschweig inland port railway in Germany since 2015. The data is used to develop data-driven algorithms and to demonstrate the potential of in-service track condition monitoring for small industrial railways.
The modular multi-sensor systems developed at DLR comprise several units fulfilling different use-case-specific tasks.
The onboard positioning unit is based on global navigation satellite systems (GNSS) such as GPS and Galileo, which are used to retrieve global position and speed information. An Inertial measurement unit (IMU), which measure three-dimensional acceleration and turn rates, supplies complementary position and speed information at a higher sampling rate such as 100Hz. This is necessary to provide sub-metre position intervals and to bridge areas where GNSS signal reception is compromised such as under bridges, in tunnels and when encountering other obstacles in the vicinity of the track.
Condition monitoring of the track is carried out by using analogue broadband three-component accelerometers with a working frequency band of 0.8-8000Hz. The accelerometers are mounted on the axle boxes on the left and right side of the shunter’s front axle. The resulting six axlebox acceleration (ABA) channels are digitised by an analogue-to-digital converter and sampled with 20.625Hz. A central data processing unit is used to collect and process the data and the popular software framework Robot Operating System (ROS) is used to acquire and process sensor data. Communication devices using LTE or upcoming 5G mobile networks enable remote maintenance and control of the system as well as status information and position retrieval.
Selective track position information with high spatial resolution is critical for the analysis of onboard track monitoring data. However, in environments such as marshalling yards or port railways, achieving accurate selective track positioning is a challenge. Here, several tracks often run in parallel and the high number of switches can result in numerous track combinations in a single train operation. Furthermore, GNSS reception in the industrial environment is often impacted by bridges, tall buildings, cranes and container stacks.
To fulfil the positioning requirements, the GNSS and IMU data are systematically fused with railway network topology information retrieved from a digital map. The combination of the different data sources employs statistical sensor fusion methods, meaning it is possible to assign monitoring data with a track identifier, the distance of a specific track, and the vehicle speed.
Processing of the ABA data itself must compensate for several factors affecting the dynamic vehicle-track interaction. The main influencing factors are the vehicle speed and abrupt acceleration, deceleration, and stopping of the train, which often occurs during shunting operation on industrial railways. Weather conditions and dirt on the track can also influence the wheel rail contact mechanism while noise from locomotive engines can affect signals recorded by the ABA sensors mounted on the shunting locomotive’s axle. In addition, shunting operations cause impacts that result in unwanted acceleration peaks.
For these reasons, appropriate data processing is indispensable and is the subject of current research at DLR. Several model-based, data-driven or hybrid algorithms can be used to extract information about track condition. A simple yet effective approach is the double integration of the ABA data.
Revealing track geometry is the approach used when deploying this technique on high-speed lines. It can be expanded to industrial railways to extract the longitudinal rail profile for wavelengths below 0.1m due to regular speeds of less than 10m/s. This wavelength band is characteristic of short rail irregularities such as corrugations and squats. The data can also be investigated in the time-frequency domain, where the frequency response of vehicle components such as wheels and axle bearings can be removed from the data. The resulting representation reflects the spectral components of the track roughness that will require further investigation.
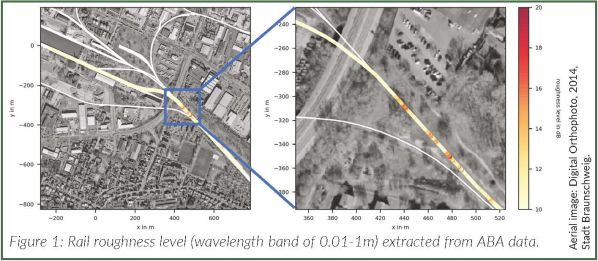
For instance, vehicle speed can be used to convert frequencies into wave numbers (spatial frequencies). In the wave number domain, track roughness levels for specific wavelength bands can be extracted. In Figure 1, the rail roughness level for wavelength between 0.01 and 1m extracted from the ABA data of a single train run is shown. The image section on the right side highlights rail segments with known corrugation. This kind of defect is clearly visible in the roughness level.
Data-driven approaches mainly rely on machine learning methodologies. If reference data such as those retrieved from manual inspections are available, supervised machine learning can be used to classify track irregularities or to extract physical parameters such as track decay rate, wheel-rail roughness and geometrical parameters via regression.
This contrasts with unsupervised learning methods. These algorithms generate purely data-based statistical models that make it possible to recognise patterns, categories and correlations in data without having to rely on annotated (labelled) data.
Prominent representations of such methods include clustering, which divide data into several categories that are distinguished from each other by characteristic patterns. The idea is that once clusters are found in a set of identified track irregularities, only representative examples of each cluster need to be manually inspected by the asset manager. In the best case, the results of this inspection can be generalised to all members of a cluster and would drastically reduce the effort required for visual inspection. Other unsupervised methods aim to translate the observed data into a simpler representation without losing relevant information. The resulting features can then be used as track health indicators.
Interest is growing in applying deep learning methods for sensor data analysis. Convolutional neuronal networks (CNN) have become standard tools in image classification and segmentation. However, the application of deep learning to the analysis of time-series data such as ABA is relatively new and not yet widely used. Nevertheless, new technical developments can be expected in the future and associated advances in hardware, software and algorithms will help us to increase the safety, reliability and efficiency of all rail sectors, including industrial railways.

